Dnes to bude spíše jen trocha teorie o krokových motorech. Jejich správné řízení je velká věda, zvláště když potřebujete dosáhnout velkých rychlostí. Naštěstí ale existuje množství již hotových řadičů, které se dají řídit dvěma signály z MCU a o zbytek se není třeba starat. I tak je ale potřeba znát alespoň základní teorii.
V následujícím textu vysvětlím jak je to s napájecím napětím krokových motorů, jelikož se na to hodně lidí ptá (hlavně v souvislosti s 3D tiskárnou RepRap).
Problém
Problém si ukážeme na konkrétním příkadu. Mějme bipolární motor 42BYGHM809 od firmy Wantai. Je to motor o velikosti NEMA17, s točivým momentem cca 0,41 N.m a úhlem 0,9 stupně na krok. To z něj dělá oblíbený typ při stavbě tiskárny RepRap, kde je potřeba těchto motorů celkem 5.
V parametrech tohoto motoru je dále uvedeno maximální napětí 2,4 V a proud 1,68 A. Když se ale podíváte na řadič krokových motorů A4988 (opět velmi oblíbený typ mezi RepRap komunitou), najdete v jeho datasheetu napájecí napětí motoru 8 až 35 V. Znamená to, že se výše popsaný motor nedá použít s A4988? Na otázku odpovím trochu zeširoka.
Přechodové děje
Bipolární krokové motory mají většinou 4 vodiče. Zjednodušeně řečeno – jeden pár patří jedné cívce a druhý pár druhé. Pokud chceme s motorem pohnout, přivádíme napětí střídavě na jednu a pak na druhou cívku. To ale znamená, že v jednom okamžiku není na cívce žádné napětí a v druhém okamžiku je na ní napájecí napětí. Než se ale na cívce objeví požadovaný proud, chvilku to trvá. Takovému stavu říkáme přechodový děj a můžeme přesně spočítat, jak dlouho potrvá. Jakmile tento přechodový děj skončí, motor se ustálí a my můžeme provést další krok.

Cívku motoru můžeme přepsat jako sériovou kombinaci ideální cívky a rezistoru. Podle datasheetu motoru 42BYGHM809 je rezistivita cívky R = 1,6 Ω a induktance L = 3,5 mH. Odtud vyjádříme diferenciální rovnici pro napětí na cívce:
\(U = u_{\mathrm{R}} + u_{\mathrm{L}} = Ri + \frac{\mathrm{d}i}{\mathrm{d}t}L
\)
A vzniklou diferenciální rovnici spočítáme a získáme vztah pro proud cívkou v čase:
\(i = \frac{U}{R} \left( 1 – \mathrm{e}^{\left( – \frac{R}{L} t \right)} \right)
\)
Na obrázku níže jsou průběhy proudu pro různá napětí cívkou motoru 42BYGHM809.
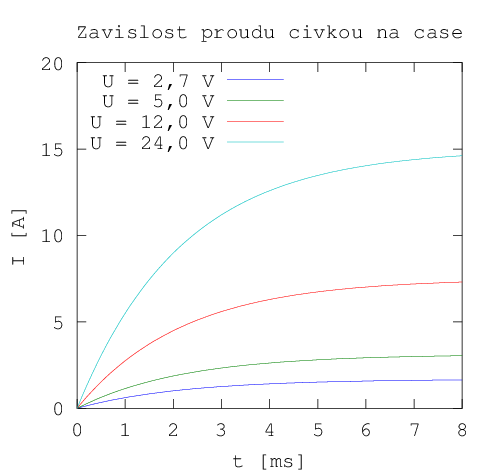
Jak je vidět, pokud na cívku motoru přivedeme jeho jmenovité napětí 2,7 V, potrvá skoro 6,6 ms, než se proud ustálí na 1,68 A.
Možná se 6,6 ms nezdá moc, ale je potřeba si uvědomit, že to je doba potřebná k ustálení proudu pro jeden krok. Jelikož na celou jednu otáčku potřebujeme 400 kroků, dostáváme se na jednu otáčku za 2,64 vteřiny. Pokud je motor připojen k nějaké převodovce nebo k závitové tyči, pak potrvá večnost, než se hlava 3D tiskárny posune o 1 mm.
Na první pohled by se dal tento problém vyřešit větším napájecím napětím motoru. Na již zmiňovaném grafu jsou průběhy proudů i pro vyšší napětí, než je jmenovité napětí motoru. Například pro 12 V se proud dostane přes hranici 1,6 A již za 0,7 ms! Ovšem po této době proud dále poroste až se dostane na své maximum 7,4 A. V ustáleném stavu tak do motoru poteče výkon 90 W, místo 4,6 W pro které je navržen a během chvilky se zničí.
Omezení proudu
Tím nám vychází dva požadavky na řízení krokových motorů – během přechodového děje chceme na cívku přivést co největší napětí, aby se proud co nejrychleji ustálil, ale hned potom je potřeba napětí omezit, abychom motor nezničili velkým výkonem.
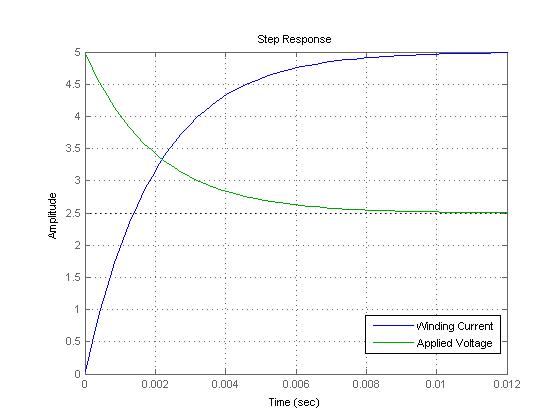
A to je v kostce vše, co dělají řadiče krokových motorů. Pravidelně se snímá proud tekoucí do cívky a podle potřeby se omezuje napětí (většinou pomocí PWM). Průběh proudu a napětí cívkou pak může vypadat tak, jako na grafu níže (graf jsem si vypujčil z článku Stepper Motor Voltages Explained). Modrý průběh je proud tekoucí do cívky a zeleně je napětí, které omezuje řadič.
Problémy
Výhodou tohoto řízení je tedy vyšší rychlost a také vyšší mechanický výkon motoru. S tím jdou ale i nevýhody.
Zvýšením napětí na cívkách (i když jen po omezenou dobu) se zvýší i ztrátový výkon, který se přemění na teplo. Motor tak bude výrazně teplejší a v extrémním případě je nutné ho chladit. Kromě toho je potřeba při větších proudech chladit i samotný řadič motoru.
Dalšími problémy jsou vyšší hlučnost a vyšší riziko zákmitu (takže se například místo jednoho kroku provedou dva).
Závěr
Takže ještě jednou a stručně, jak je to s tím napájecím napětím: jmenovité napětí krokového motoru by se v ustáleném stavu nemělo překročit. Během kroku (přechodový děj) je ale naopak žádoucí, aby bylo napětí mnohem vyšší, a proto se používají nejrůznější řadiče se zpětnou vazbou, které omezují proud (převážně pomocí PWM).
Takže řadič A4988 napájený 12 V lze použít pro motor s jmenovitým napětím 2,7 V. Jenom je potřeba dobře nastavit maximální proud do cívky (na A4988 se to dělá řídícím napětím, u Pololu A4988 k tomu slouží malý trimr přímo na DPS).